近期沙尘肆虐,每天晚上回家,家里地上都是一层土,面对这种情况唯一能做的就是扫地和拖地了,但累了一天很多人都不愿意天天晚上一回家就扫地,但不扫地,这些灰尘又会影响到大家的身体健康,面对这样尴尬的情况,很多聪明的懒人就发现了扫地机器人可以解决这个问题。
扫地机器人真的好用吗?相较于5-10年前来说,扫地机器人已经成为了一个真正意义上解决痛点的生产力了,市面上80%以上的扫地机器人基本都能较好的完成地面清扫工作,这是不用怀疑的。但对于用户来说需要甄别的是,哪款扫地机器人清洁效果更好,哪款扫地机器人性价比更好,对于这种情况,用户该如何去抉择,今天就整体带大家分析下。
扫地机器人选购的核心点就是吸力、导航、避障、清洁方式等几个核心要素,只有把这几个点做好的产品才能满足用户日常需求。
扫地机器人类型有哪些:
以功能为划分,现在市面上的扫地机器人分三大类——单扫地、扫地+拖地(不带自动洗拖布)和扫拖一体(带自动洗拖布功能)本文将为大家介绍不同类型扫地机器人的功能与特点。
单扫地、扫地+拖地机器人价格便宜
其实现在市面上只有扫地功能的机器人比较少了,更多的是扫地+拖地机器人,但是需要手动洗拖布换拖布。所以这前两类可以合并一起讲讲。

不管是哪种类型的扫地机器人,扫地时的吸力大小都是非常重要的,扫的干净,拖得才会更干净。一般而言,扫地机器人的吸力在2500Pa以上,都能很好的清理家里的灰尘。
需要拖地时,扫地+拖地机器人需要手动换上拖布,由于机身携带水箱较小,所以换水的频率也会稍微高些。拖完地需要自己清洗拖布,晾干后继续在扫地机上使用。因为不是全自动的,价格相对便宜,一般在2000元以内,适合想花小预算体验的新手。
扫拖一体机器人,更大程度上解放双手
相较于以上那种,扫拖一体机器人能更大程度上解放双手,价格也更贵,在3500元左右。扫地机器人都会有一个基站,扫地机会自己到基站上进行自动集尘,自动换水,进行拖布的清洁,但是尘盒还是需要自己定期倒。
但是扫拖一体机器人也有一点,需要定期清理基站。之前有一位朋友拿着扫地机给新家开荒,结果清理一圈下来,发现扫地机的基站非常的脏,什么石灰啊、沙子的都在里面。由于基站拿不下来,还得掏着清理,也是非常心累。

对于租房党新手来说,推荐入手扫地+拖地机器人,性价比更高。你会发现其实扫地机扫一圈下来也挺干净了,而且租的房子一般都没有预留上下水,买扫拖一体的不方便。不过预算比较充足,预留了上下水,想要一步到位的,不妨买个扫拖一体的回来感受一下。
扫地机器人清洁力大小如何分辨:
扫地机器人的清洁能力主要是三个方面吸力、主刷和边刷,吸力决定了扫地机吸入颗粒物大小的能力,主刷决定了对地面深度清洁的能力,边刷决定了墙边墙角位置的清洁能力。
吸力:
扫地机器人的清扫能力取决于吸力大小,一般来说,600Pa的吸力就可以应对家庭中的浮灰。但是,如果需要清理除灰尘之外的颗粒杂物,则需要至少2000Pa的吸力。此外,滚刷和边刷也是提高扫地机器人清扫效率的重要组成部分。建议消费者购买具有至少2000Pa吸力、滚刷和边刷的扫地机器人来满足更高的清扫需求。
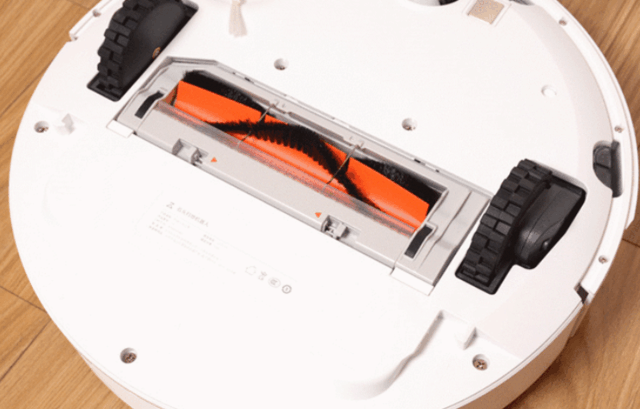
主刷:
扫地机器人的滚刷类型是影响清扫效果的重要因素。滚刷可以分为胶条滚刷和刷毛滚刷两种材质,两者的选择取决于需要清理的颗粒类型。胶条滚刷可以刮掉地面的顽固颗粒,而刷毛滚刷则能拔出地砖和地板缝隙的灰尘。如果购买时可以选购这两种滚刷的集合体,则效果最佳。另外,有些扫地机器人采用无滚刷设计,例如云鲸扫地机器人采用吸口式设计,避免了头发缠绕的问题,也是不错的选择。
边刷:
扫地机器人的边刷作为主刷的辅助部分,可以帮助聚拢灰尘和毛发。边刷分为单边刷和双边刷,但是不能仅凭边刷数量来决定扫地机器人的好坏,还要结合产品性能来看。市面上的单边刷和双边刷机型各占一半,但是双边刷的清扫聚拢效果更好,而单边刷的清扫效果稍弱。因此,建议消费者在购买时,除了考虑边刷数量外,还要结合其他产品性能参数选择适合自己的扫地机器人。
扫地机器人核心导航选择哪种好:
简单来说扫地机器人就像是你的双眼,一旦双眼出现问题,你就很难轻松自如的在家里正确行走。而目前主流的导航方式基本上就是LDS激光雷达、D-TOF导航以及视觉导航三种。所以大家选择扫地机器人也基本上都要围绕着三种导航方式。
激光导航:推荐指数★★★★★
激光导航的扫地机器人是通过LDS激光雷达扫描来判断自己的位置。通过高速旋转发射激光,再通过激光发射后触及障碍物反射回来的时间判断自己和障碍物之间的距离,从而判断相对位置,实现定位。

这种扫地机器人的优点是定位精度高,即使是无光环境也能精准定位,但它也有两个缺点:一是激光雷达要频繁转动、易损概率更高,二是探测到落地窗、落地镜、花瓶等高反射率物体会存在误差。
但综合来说LDS激光雷达导航还是目前扫地机器人导航的最佳选择,应用年限长,技术成熟,价格便宜,精度高。

TOF 雷达导航:推荐指数★★★★
dToF英文名为Direct-Time of flight,中文直译为直接飞行时间,工作原理非常简单,发射设备会首先发射光脉冲,当光脉冲遇见障碍物时会发生反射,已知光的传播速度是一定的,当距离不同时,接收反射光线的时间也不同,通过记录光脉冲的反射时间,就可以计算出光脉冲发射位置到物体位置的距离,不断的重复这一过程,就能绘制出物体的3D形态。
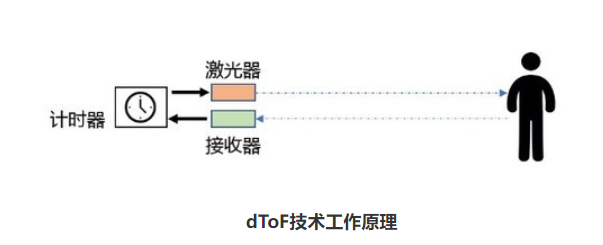
作为扫地机的技术应用,采用dToF技术的TrueMapping全局规划技术较LDS激光雷达有明显优势,比如精度更高、探测距离更远、寿命更长、功耗更低等等。

目前来看是一个新兴技术,与激光雷达有类似的地方,但综合来看目前成本还比较高,技术应用相对不够成熟。

视觉导航:推荐指数★★★
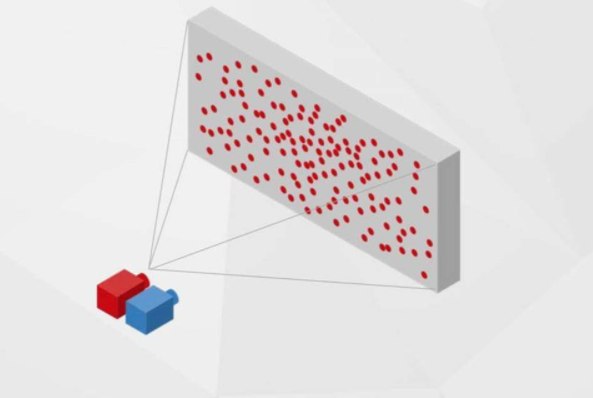
视觉导航的扫地机器人是通过摄像头来实现定位的。搭载这种定位系统的扫地机器人顶部会有一个摄像头,通过复杂的算法让机器人能够通过感知由亮度不同的光点组成的光学图像来进行定位。这些光学影像从不同的角度看起来是各不相同的,通过不断收集这些图像信息,机器人可以在自身构建的地图上进行定位,从而知道哪些位置已经扫过、哪些地方需要清洁。

但是,你有没有想过,如果在光线昏暗甚至无光环境(比如床和柜子的下方或晚上),这种仅依靠视觉技术实现定位的扫地机器人是不是就失灵了?如果单纯依靠视觉定位当然是这样,但一些负责任的厂商会给扫地机器人设计多重传感系统,做到相互补充、万无一失。
相对来说视觉导航的硬件成本低,但软件算法的成本比较高和复杂,需要强大的软件算法技术,而绝大多数品牌都做不到非常精准,甚至目前行业里也很少有把摄像头导航做的像激光雷达一样精准的品牌。所以视觉导航产品可以看到,目前市面上产品并不多了。

扫地机器人避障功能该如何选择:
扫地机器人好不好用,避障是一个躲不开的话题,好的扫地机器人避障功能强,不仅能通过避障解决避免碰坏家居、被障碍物困住等问题,同时还能最大程度的做到高覆盖的清洁效果,反之不仅清洁覆盖率不够,同时还容易因为障碍物导致扫地机器人本身被困住。
目前几种比较主流的扫地机器人避障解决方案机械避障、视觉避障、激光雷达避障、3D结构光避障、3D ToF避障、红外光源避障等。
机械避障:早期扫地机器人使用的主流避障技术,目前主流产品基本淘汰,只有低端产品再用,主要原理就是扫地机器人在直接与物体碰撞后,触发传感器工作,而转移位置移动,需要扫地机器人不停碰撞障碍物,不仅效率低,准确度低,同时容易损坏家居。
视觉避障:视觉避障就是通过摄像头像人眼一样对物体进行识别后避障,双目的要比单目的效果更好,优点就是结合数据能够更好的识别障碍物,并且给出更精准的解决方案,缺点就是受光线影响大,受数据算法影响大,精度低。

激光雷达避障:通过激光雷达发射和接受反射信号,判断与障碍物的距离,反应迅速,效果好,成本低,偶尔会误判。
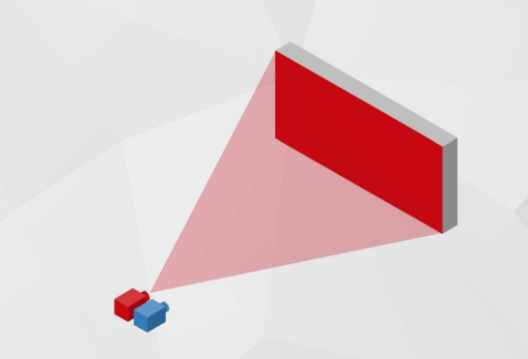
3D结构光避障:向障碍物发射结构光线,根据光点的反射情况对障碍物进行识别并避障,优点是能够获取障碍物的3D结构,同时基于算法和数据能够更好的躲避大部分障碍物,缺点是扫描距离短,也容易受到强光影响。
3D ToF避障:发射激光到物体后计算反射时间,从而根不同时间计算可以获得物体的形状深度,从而实现避障功能。优点是识别的距离远,不易受环境影响,缺点是成本高,识别分辨率比较低。
红外光源避障:通过发射红外线、接受反射的光线、用三角测距的原理判断和障碍物之间的距离。优点是成本低、容易实现。缺点是精度不高,对深色可吸收红外线的物体比较敏感,影响准确度。
整体来说,3D TOF避障>激光雷达避障>3D结构光避障>视觉避障>红外光源避障>机械避障
只能说以上的排名仅供参考并不绝对,因为目前来看扫地机器人的避障技术一般都不会使用单一技术,很多中高端产品都是多技术结合,对于消费者来说也不能过分依赖扫地机器人的避障技术,核心的思路还是应该帮助扫地机器人清洁掉工作区域的障碍。
APP也很重要 这些功能需要有:
扫地机器人可以说是解放双手的重要工具,很多用户都会选择功能齐全的扫地机器人来完成清洁工作,但如果只注重了产品的功能可不行,因为配套的App也应该是我们关注的重点,如果App不好用,扫地机器人的使用体验也会大打折扣。
对于扫地机器人来说安装屏幕是不现实的,而安装多个按钮除了不美观外,很多功能也无法彻底的实现,因此必须要通过APP来提升用户对扫地机器人的控制力。所以在今天没有APP功能的扫地机器人可以说是个“不智能”的扫地机器人。
扫地机器人APP要包含哪些功能?首先是最基本的绘图功能,没有绘图功能的扫地机器人都只能算是个遥控器,因为很多附加功能都是在扫地机器人完成绘图后实现的。
设置虚拟墙
其次虚拟墙或者分区、划区功能,虚拟墙可以说是扫地机器人必备的功能,扫地机器人无法控制自己的活动区域,需要虚拟墙的辅助来控制扫地机器人的活动范围,而传统的虚拟墙不但是单独的分体式设计,使用麻烦不直观外,而且价格也不便宜。目前APP的虚拟墙或者分区功能,通过手机一个简单的操作,动动手指,就可以设置N个虚拟墙,来避免扫地机器人进入“雷区”,而分区和划区清扫功能也是同理!
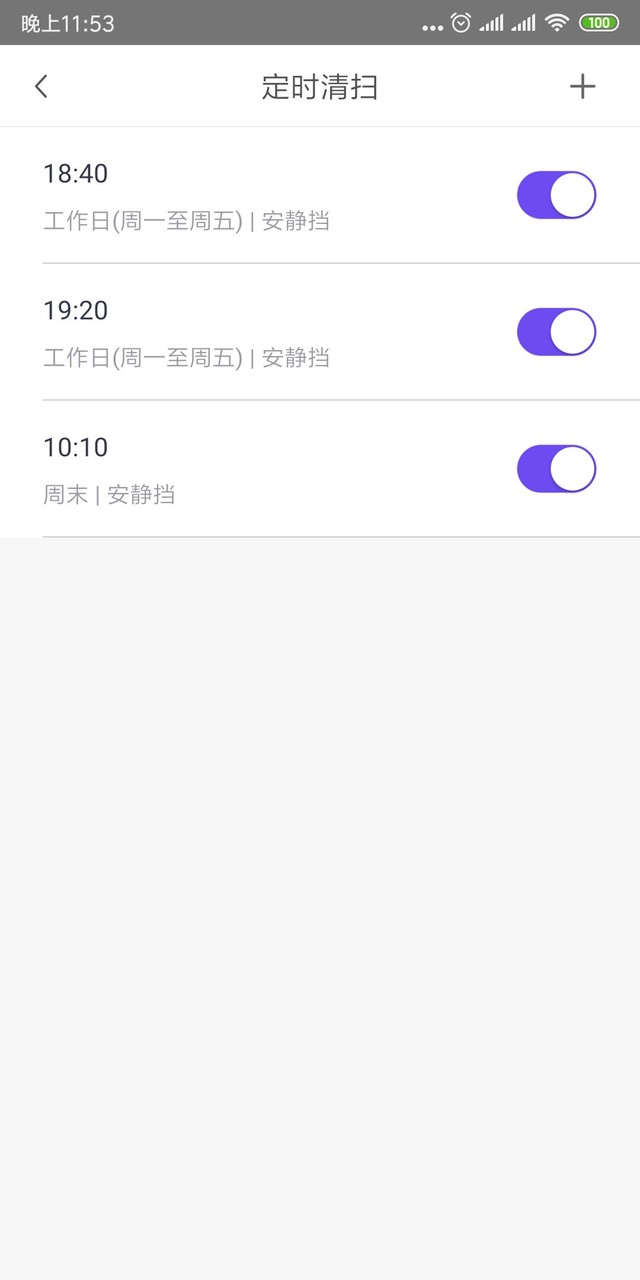
预约清扫才是扫地机器人发挥真正价值的根本
最后则是吸力调节、预约和遥控,先说吸力调节,一方面调节吸力大小更个性化,另外一方面则是通过吸力可以控制扫地机器人的噪音大小,其次是预约功能,扫地机器人最好是在家里没人的时候使用,因此预约功能 的重要性可见一斑,最后就是遥控,这个功能比较鸡肋,但比较关键的是,它可以让用户操控扫地机器人,不但增加了乐趣,还可以做一些定点的清扫。