扫地机器人好不好用,避障是一个躲不开的话题,好的扫地机器人避障功能强,不仅能通过避障解决避免碰坏家居、被障碍物困住等问题,同时还能最大程度的做到高覆盖的清洁效果,反之不仅清洁覆盖率不够,同时还容易因为障碍物导致扫地机器人本身被困住。

目前几种比较主流的扫地机器人避障解决方案机械避障、视觉避障、激光雷达避障、3D结构光避障、3D ToF避障、红外光源避障等。
机械避障:早期扫地机器人使用的主流避障技术,目前主流产品基本淘汰,只有低端产品再用,主要原理就是扫地机器人在直接与物体碰撞后,触发传感器工作,而转移位置移动,需要扫地机器人不停碰撞障碍物,不仅效率低,准确度低,同时容易损坏家居。
视觉避障:视觉避障就是通过摄像头像人眼一样对物体进行识别后避障,双目的要比单目的效果更好,优点就是结合数据能够更好的识别障碍物,并且给出更精准的解决方案,缺点就是受光线影响大,受数据算法影响大,精度低。


激光雷达避障:通过激光雷达发射和接受反射信号,判断与障碍物的距离,反应迅速,效果好,成本低,偶尔会误判。

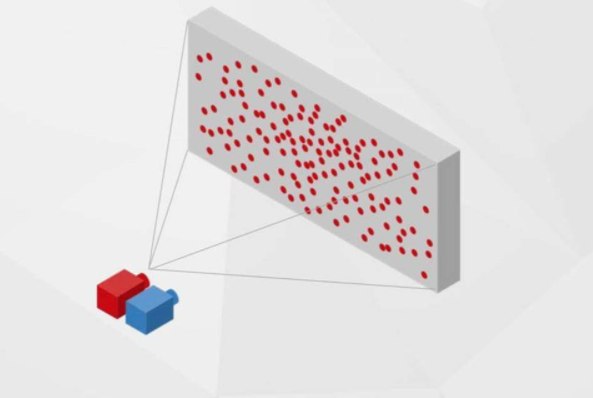
3D结构光避障:向障碍物发射结构光线,根据光点的反射情况对障碍物进行识别并避障,优点是能够获取障碍物的3D结构,同时基于算法和数据能够更好的躲避大部分障碍物,缺点是扫描距离短,也容易受到强光影响。
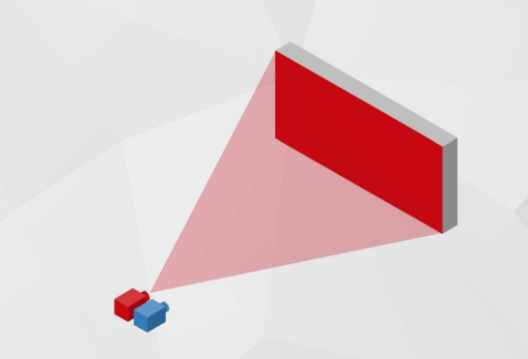
3D ToF避障:发射激光到物体后计算反射时间,从而根不同时间计算可以获得物体的形状深度,从而实现避障功能。优点是识别的距离远,不易受环境影响,缺点是成本高,识别分辨率比较低。

红外光源避障:通过发射红外线、接受反射的光线、用三角测距的原理判断和障碍物之间的距离。优点是成本低、容易实现。缺点是精度不高,对深色可吸收红外线的物体比较敏感,影响准确度。
整体来说,3D TOF避障>激光雷达避障>3D结构光避障>视觉避障>红外光源避障>机械避障
只能说以上的排名仅供参考并不绝对,因为目前来看扫地机器人的避障技术一般都不会使用单一技术,很多中高端产品都是多技术结合,对于消费者来说也不能过分依赖扫地机器人的避障技术,核心的思路还是应该帮助扫地机器人清洁掉工作区域的障碍。