01ЙЁµШ»ъЖчИЛµјєЅДДЦЦєГЈї
ІъЖ·ЈєИ«ДЬЙЁНП»ъЖчИЛ 1S ГЧјТ ЙЁµШ»ъЖчИЛЙЁµШ»ъЖчИЛЧчОЄТ»ёцОЮИЛЙи±ёЈ¬ЛьµДФАнєНДїЗ°ЧФ¶ЇјЭК»µДµз¶ЇіµЖдКµПаІоОЮјёЎЈ¶шЙЁµШ»ъЖчИЛЧФ¶Ї№¤ЧчµДєЛРДѕНКЗµјєЅПµНіЈ¬ЛщТФСЎФсЙЁµШ»ъЖчИЛѕНКЗСЎФсµјєЅПµНіЈ¬Т»µ©µјєЅІ»РРЈ¬ДгµДЙЁµШ»ъЖчИЛ¶а°лІ»»бУРМ«єГµДМеСйЎЈ
јтµҐАґЛµЙЁµШ»ъЖчИЛѕНПсКЗДгµДЛ«СЫЈ¬Т»µ©Л«СЫіцПЦОКМвЈ¬ДгѕНєЬДСЗбЛЙЧФИзµДФЪјТАпХэИ·РРЧЯЎЈ¶шДїЗ°ЦчБчµДµјєЅ·ЅКЅ»щ±ѕЙПѕНКЗLDSј¤№вАЧґпЎўD-TOFµјєЅТФј°КУѕхµјєЅИэЦЦЎЈЛщТФґујТСЎФсЙЁµШ»ъЖчИЛТІ»щ±ѕЙП¶јТЄО§ИЖЧЕИэЦЦµјєЅ·ЅКЅЎЈ
ј¤№вµјєЅЈєНЖјцЦёКэЎпЎпЎпЎпЎп
ј¤№вµјєЅµДЙЁµШ»ъЖчИЛКЗНЁ№эLDSј¤№вАЧґпЙЁГиАґЕР¶ПЧФјєµДО»ЦГЎЈНЁ№эёЯЛЩРэЧЄ·ўЙдј¤№вЈ¬ФЩНЁ№эј¤№в·ўЙдєуґҐј°ХП°Оп·ґЙд»ШАґµДК±јдЕР¶ПЧФјєєНХП°ОпЦ®јдµДѕаАлЈ¬ґУ¶шЕР¶ППа¶ФО»ЦГЈ¬КµПЦ¶ЁО»ЎЈ

ХвЦЦЙЁµШ»ъЖчИЛµДУЕµгКЗ¶ЁО»ѕ«¶ИёЯЈ¬јґК№КЗОЮ№в»·ѕіТІДЬѕ«Чј¶ЁО»Ј¬µ«ЛьТІУРБЅёцИ±µгЈєТ»КЗј¤№вАЧґпТЄЖµ·±ЧЄ¶ЇЎўТЧЛрёЕВКёьёЯЈ¬¶юКЗМЅІвµЅВдµШґ°ЎўВдµШѕµЎў»ЁЖїµИёЯ·ґЙдВКОпМе»бґжФЪОуІоЎЈ
µ«ЧЫєПАґЛµLDSј¤№вАЧґпµјєЅ»№КЗДїЗ°ЙЁµШ»ъЖчИЛµјєЅµДЧојССЎФсЈ¬У¦УГДкПЮі¤Ј¬јјКхіЙКмЈ¬јЫёс±гТЛЈ¬ѕ«¶ИёЯЎЈ

TOF АЧґпµјєЅЈєНЖјцЦёКэЎпЎпЎпЎп
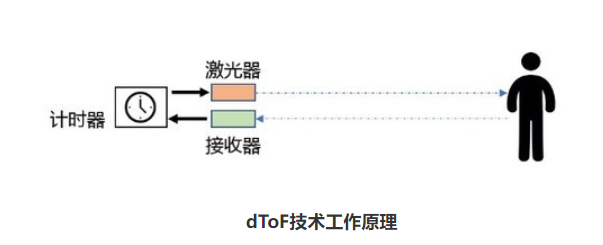
dToFУўОДГыОЄDirect-Time of flightЈ¬ЦРОДЦ±ТлОЄЦ±ЅУ·ЙРРК±јдЈ¬№¤ЧчФАн·ЗіЈјтµҐЈ¬·ўЙдЙи±ё»бКЧПИ·ўЙд№вВціеЈ¬µ±№вВціеУцјыХП°ОпК±»б·ўЙъ·ґЙдЈ¬ТСЦЄ№вµДґ«ІҐЛЩ¶ИКЗТ»¶ЁµДЈ¬µ±ѕаАлІ»Н¬К±Ј¬ЅУКХ·ґЙд№вПЯµДК±јдТІІ»Н¬Ј¬НЁ№эјЗВј№вВціеµД·ґЙдК±јдЈ¬ѕНїЙТФјЖЛгіц№вВціе·ўЙдО»ЦГµЅОпМеО»ЦГµДѕаАлЈ¬І»¶ПµДЦШёґХвТ»№эіМЈ¬ѕНДЬ»жЦЖіцОпМеµД3DРОМ¬ЎЈ
ЧчОЄЙЁµШ»ъµДјјКхУ¦УГЈ¬ІЙУГdToFјјКхµДTrueMappingИ«ѕЦ№ж»®јјКхЅПLDSј¤№вАЧґпУРГчПФУЕКЖЈ¬±ИИзѕ«¶ИёьёЯЎўМЅІвѕаАлёьФ¶ЎўКЩГьёьі¤Ўў№¦єДёьµНµИµИЎЈ

ДїЗ°АґїґКЗТ»ёцРВРЛјјКхЈ¬Улј¤№вАЧґпУРАаЛЖµДµШ·ЅЈ¬µ«ЧЫєПАґїґДїЗ°іЙ±ѕ»№±ИЅПёЯЈ¬јјКхУ¦УГПа¶ФІ»№»іЙКмЎЈ

КУѕхµјєЅЈєНЖјцЦёКэЎпЎпЎп
КУѕхµјєЅµДЙЁµШ»ъЖчИЛКЗНЁ№эЙгПсН·АґКµПЦ¶ЁО»µДЎЈґоФШХвЦЦ¶ЁО»ПµНіµДЙЁµШ»ъЖчИЛ¶ҐІї»бУРТ»ёцЙгПсН·Ј¬НЁ№эёґФУµДЛг·ЁИГ»ъЖчИЛДЬ№»НЁ№эёРЦЄУЙББ¶ИІ»Н¬µД№вµгЧйіЙµД№вС§НјПсАґЅшРР¶ЁО»ЎЈХвР©№вС§У°ПсґУІ»Н¬µДЅЗ¶ИїґЖрАґКЗёчІ»ПаН¬µДЈ¬НЁ№эІ»¶ПКХјЇХвР©НјПсРЕПўЈ¬»ъЖчИЛїЙТФФЪЧФЙн№№ЅЁµДµШНјЙПЅшРР¶ЁО»Ј¬ґУ¶шЦЄµАДДР©О»ЦГТСѕЙЁ№эЎўДДР©µШ·ЅРиТЄЗеЅаЎЈ

µ«КЗЈ¬ДгУРГ»УРПл№эЈ¬Из№ыФЪ№вПЯ»и°µЙхЦБОЮ№в»·ѕіЈЁ±ИИзґІєН№сЧУµДПВ·Ѕ»тНнЙПЈ©Ј¬ХвЦЦЅцТАїїКУѕхјјКхКµПЦ¶ЁО»µДЙЁµШ»ъЖчИЛКЗІ»КЗѕНК§БйБЛЈїИз№ыµҐґїТАїїКУѕх¶ЁО»µ±И»КЗХвСщЈ¬µ«Т»Р©ёєФрИОµДі§ЙМ»бёшЙЁµШ»ъЖчИЛЙијЖ¶аЦШґ«ёРПµНіЈ¬ЧцµЅП໥І№ідЎўНтОЮТ»К§ЎЈ
Па¶ФАґЛµКУѕхµјєЅµДУІјюіЙ±ѕµНЈ¬µ«ИнјюЛг·ЁµДіЙ±ѕ±ИЅПёЯєНёґФУЈ¬РиТЄЗїґуµДИнјюЛг·ЁјјКхЈ¬¶шѕшґу¶аКэЖ·ЕЖ¶јЧцІ»µЅ·ЗіЈѕ«ЧјЈ¬ЙхЦБДїЗ°РРТµАпТІєЬЙЩУР°СЙгПсН·µјєЅЧцµДПсј¤№вАЧґпТ»Сщѕ«ЧјµДЖ·ЕЖЎЈЛщТФКУѕхµјєЅІъЖ·їЙТФїґµЅЈ¬ДїЗ°КРГжЙПІъЖ·ІўІ»¶аБЛЎЈ