1)RPS激光定位系统
RPS激光定位系统
所谓RPS激光导航定位系统,是通过安装在扫地机器人上方的激光发射器和接收器测量设备与环境距离的变化以实现定位,定位比较精确,但在具体使用过程中也有不足。
RPS激光定位系统
这种定位系统有个硬伤,就是无法探测到落地窗、落地镜、花瓶等高反射率物体,因为激光打到这类物体上无法接收散射光;另外,为了保证获得全新数据,360°旋转激光探头必须一直旋转,结果就是会缩短产品寿命。
2)无线载波室内定位系统
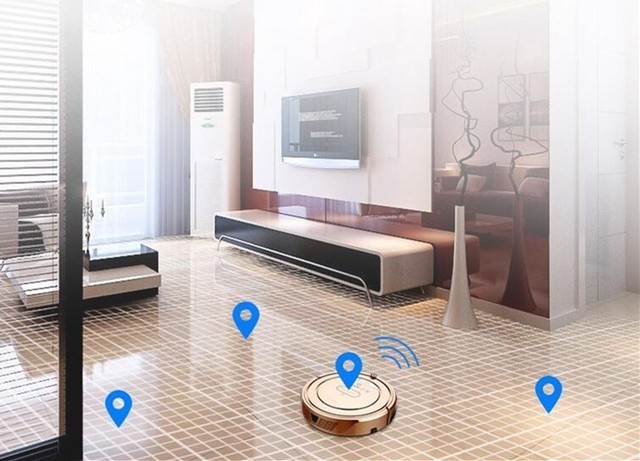
无线载波室内定位系统
搭载无线载波室内定位系统的扫地机器人机身和充电基座均内置无线载波探头,机器人通过测算自身和充电基座的偏移角度来确定自己的位置。但是,这种定位系统在小空间内可实现精准定位,一旦放到有多个房间的屋子就可能无法实现全屋精准定位了。
3)vSLAM视觉即时定位与绘图技术

顶部摄像头
vSLAM视觉即时定位与构图技术是一种利用机器人视觉系统实现实时自主定位与地图构建的系统。搭载这种定位系统的扫地机器人顶部会有一个摄像头,通过复杂的算法让机器人能够通过感知由亮度不同的光点组成的光学图像来进行定位。这些光学影像从不同的角度看起来是各不相同的,通过不断收集这些图像信息,机器人可以在自身构建的地图上进行定位,从而知道哪些位置已经扫过、哪些地方需要清洁。

vSLAM视觉即时定位与构图技术
但是,你有没有想过,如果在光线昏暗甚至无光环境(比如床和柜子的下方或晚上),这种仅依靠视觉技术实现定位的扫地机器人是不是就失灵了?如果单纯依靠视觉定位当然是这样,但一些负责任的厂商会给扫地机器人设计多重传感系统,做到相互补充、万无一失。举个例子:

多重传感系统相互配合实现精确定位
比如说来自美国的机器人公司iRobot,旗下的Roomba 9系扫地机器人搭载了多重传感系统:Wheel Odometry轮胎里程计(有两个传感器内置于轮胎内,检测轮胎行进了多少距离),Optical Float Sensor光学移动传感器(凭借光学流动信号反馈系统,在不同介质的地面上估算扫地机器人移动了多少距离),以及vSLAM™视觉运算处理技术,还有其它碰撞、悬崖、沿边传感器等。得益于此系统,Roomba 9系扫地机器人即使在光线条件不佳,或者某一个传感系统不适用时,仍能够进行正常工作。
听上去有点复杂?普通消费者怎么弄清楚扫地机器人是否搭载了全面的传感器?教大家个好办法。大家在选购扫地机器人时,不妨试试蒙住机器人的摄像头,看看机器人是否还可以正常高效的工作。
本文属于原创文章,如若转载,请注明来源:别让广告遮了眼 扫地机器人选购0误区指南//jd.zol.com.cn/660/6605135.html