我要怎么去?
前两个问题解决了,“我”要怎么去该如何解决呢?对于目前的扫地机器人来说,想要高效的完成清洁任务,一条有效的清洁路线还是非常有必要的。不管是定位、测距还是建图,都是为行走路径服务的。接下来笔者用延时摄影的方法带你们看看扫地机器人是如何“走位”的。

“弓”形清扫
“弓”形清扫:这是很多扫地机器人都在用的行走路径,主要是扫地机器人按照弓字型来行走(两种情况:①开启机器后直接进行弓形清扫;②先清洁边缘画出区域,然后在区域里进行弓形清洁),提高清洁覆盖率,减少重复清扫率,让清洁覆盖率更高,同时也降低了清洁用的时间。
优点:规律行走,路径相对较短,清洁效率高,高覆盖率。
缺点:有规律所以必须按照规律清扫,一旦清扫不干净将无法返工。
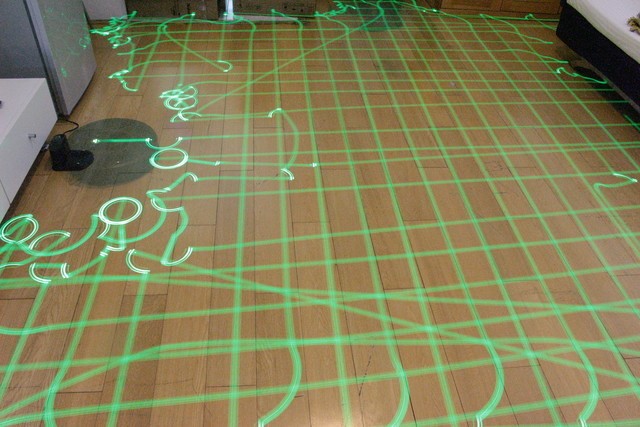
蛛网式清扫
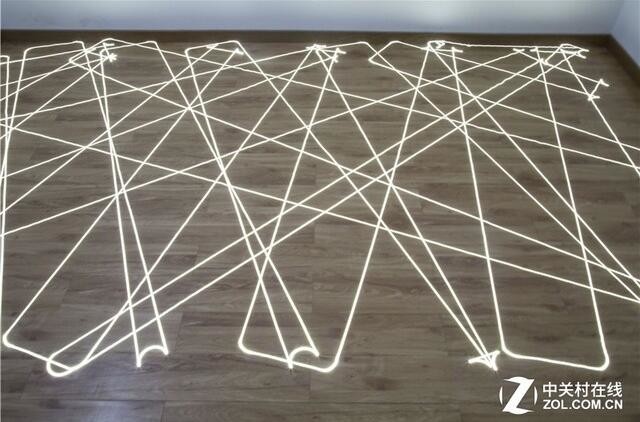
蛛网式清扫:整个清洁路径看上去就像一个几何图案,路线整体呈现蛛网式的形状,虽然看上去很有规律,但是这是机器人通过碰撞折返才能形成的路径。
优点:可达到高覆盖率,清扫面积更广。
缺点:随机性强,工作时间长。

“回”形清扫
“回”形清扫:此路线的扫地机器人肉眼观察很难寻找出规律,而在延时摄影拍摄之后,可以看出,扫地机器人一直按照“回”字形行走,由中心区域开始,不断扩大清洁半径,从而使清洁面积逐渐扩大,让清洁的时间变得更短。
优点:清洁效率高,覆盖率高。
缺点:对产品吸力有很高的要求。

“Y”字形清扫
“Y”字形清扫:一般应用于拖地机器人的湿拖模式,机器反复进行“左侧前移-回退-右侧前移-回退”这样的Y型路线,拖干净一处才会继续往前行走,湿拖的情况下行走的大路线是一个扇形,而不是一个直线。
优点:覆盖率高,可以做到深度清洁。
缺点:不能直线行走,边边角角无法清洁,一旦清洁不干净无法返工。
“田”字形清扫
“田”字形清扫:从行走路径来看,这样的扫地机器人路径规律最终呈现田字格的形式,覆盖率极高,连狭窄的柜底都不放过,一吸即净,清扫不重复,不遗漏任何地方。
优点:清洁面积广,覆盖率高。
缺点:对于扫地机器人智能技术要求很高。

折现式清扫
折现式清扫:看似无规律的清扫实则有一定的清洁规律,它会按照三角形、五边形轨迹尝试性的覆盖作业区,如果遇到障碍,智能传感器会帮助扫地机器人调整其路线,以便达到更高效的清洁。
优点:覆盖率高,根据环境障碍可自行调节行走路径,更加智能,清洁效果更加彻底。
缺点:用时较长。
本文属于原创文章,如若转载,请注明来源:连这些都不知道 如何买到好用的扫地机器人?//jd.zol.com.cn/650/6503958.html